
 Nederlands
Nederlands English
English Deutsch
DeutschInspection
Inspection 3D par drone : comparatif des méthodes de vol DJI sur un cas réel
Juin
Inspecter des statues en bronze situées à plus de 50 mètres de hauteur sur la façade d’un palais pose une question simple : quelle méthode de vol automatisé donne le modèle 3D le plus précis sans accès physique à l’ouvrage. Sur ce chantier patrimonial mené à Bruxelles en décembre 2025, quatre méthodes de vol DJI ont été testées et comparées sur la même cible : Area Route, Slope Route, Geometry Route et Smart3D Route. La Geometry Route ressort avec un RMSE (Root Mean Square Error, erreur quadratique moyenne) de géoréférencement de 0,012 mètre et un RTK Fix de 100 %, tout en utilisant 3,7 fois moins d’images que la Smart3D pour un résultat équivalent. Voici la méthode complète, les paramètres de chaque vol et les résultats chiffrés.
Le contexte : un patrimoine inaccessible sans documentation 3D
Le bâtiment inspecté est le Palais 5 de Brussels Expo, érigé pour l’Exposition universelle de 1935 sur le plateau du Heysel, au nord de Bruxelles, et conçu par l’architecte Joseph Van Neck dans un style Art déco monumental.
Le Palais 5 est une prouesse d’ingénierie : 51 mètres de hauteur, 165 mètres de longueur, plus de 90 mètres de largeur, la plus grande ossature en béton armé au monde en 1935, avec des arches paraboliques de 86 mètres de portée sans appui intermédiaire. Quatre statues en bronze ornent la façade et symbolisent la Navigation, la Vapeur, le Transport et l’Aviation. Elles ont été réalisées sous la direction d’Egide Rombaux, avec la contribution de Zhang Chongren, artiste chinois et ami proche d’Hergé, à la conception de la façade. Le palais a servi de hall d’entrée principal pour l’Expo 58 et fait aujourd’hui partie d’un complexe de 12 halls totalisant 115 000 m², le plus grand site d’exposition du Benelux.
Ces structures de 90 ans exigent une surveillance patrimoniale régulière. Le service technique de Brussels Expo assure la maintenance de ces 12 halls Art déco. Sa contrainte de départ est fréquente dans le secteur du patrimoine : aucune documentation 3D de l’état actuel des structures n’existait. Les statues, à plus de 50 mètres au-dessus du sol, sont inaccessibles sans plateforme aérienne ou échafaudage, avec un risque pour les opérateurs en hauteur.

L’objectif de la mission, réalisée dans la CTR de l’aéroport de Bruxelles : produire un modèle 3D précis de la façade et des statues, détecter des anomalies invisibles depuis le sol, établir une référence de base pour le suivi de dégradation dans le temps, et surtout valider comparativement les méthodes de vol automatisé sur les critères de sécurité et de précision.
Le matériel : un écosystème DJI Enterprise intégré
L’opération a été menée avec un écosystème entièrement DJI, sans logiciel tiers. Le DJI Matrice 4E a été retenu pour son module RTK intégré avec antenne (aucun équipement de positionnement additionnel n’est requis), sa caméra grand-angle 20 MP optimisée pour la photogrammétrie, et son format compact adapté aux environnements urbains contraints. Classé C2 au titre du règlement européen, le Matrice 4E peut être opéré en sous-catégorie A2 de la catégorie Ouverte (Open), un atout pour les missions urbaines à proximité de personnes. DJI FlightHub 2 a servi à la planification de mission sur la base d’un modèle 3D réel. DJI Terra a assuré le traitement photogrammétrique. Un réseau RTK a fourni le positionnement centimétrique en temps réel.
Le choix du réseau RTK plutôt que de points de calage au sol (GCP) est déterminant. Le DJI Matrice 4E intègre une antenne RTK qui se connecte au réseau GNSS national et fournit des corrections de positionnement centimétriques en temps réel. Le drone obtient ainsi un géoréférencement absolu de niveau sous-centimétrique en mode RTK Fix, sans déploiement de cibles physiques sur le site : déploiement plus rapide, précision absolue équivalente lors de la reconstruction.
Le palais se situe en espace aérien contrôlé. Une coordination préalable avec le contrôle aérien (ATC) a été conduite avant le décollage, comme l’impose le règlement européen EU 2019/947, avec une fenêtre de vol restreinte. En Belgique, l’arrêté ministériel du 21 décembre 2020 établissant les zones géographiques UAS impose en outre de vérifier l’accès à l’espace aérien via l’outil DAA Planner avant chaque vol. Le point de décollage a été choisi sur la place publique faisant face à la façade.
La méthode : générer d’abord un modèle 3D de référence
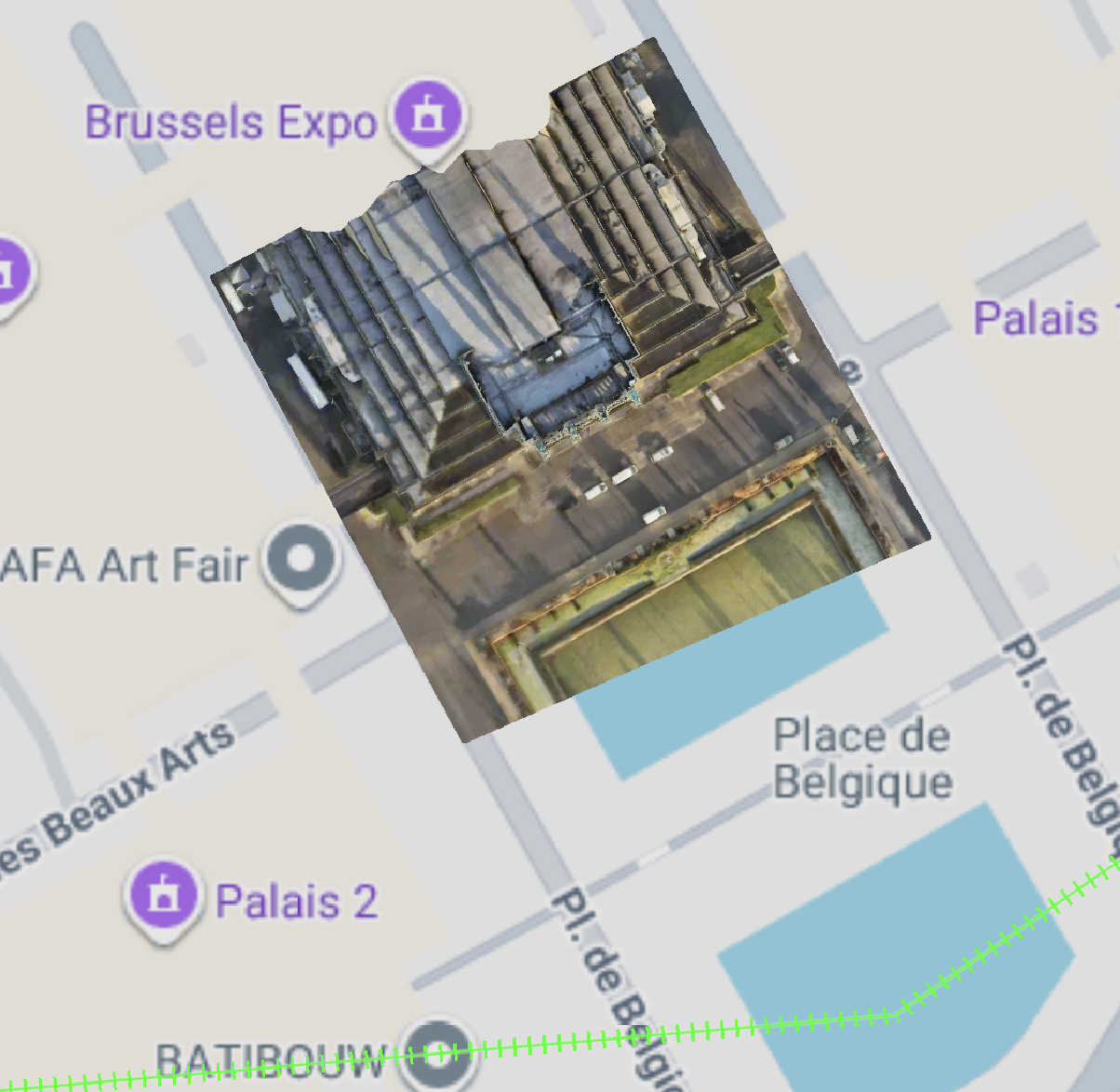
Toute la démarche repose sur un principe : on ne planifie pas une inspection rapprochée sur un fond cartographique générique, mais sur un modèle 3D réel et géoréférencé du bâtiment. La première étape consiste donc à générer ce modèle de référence.
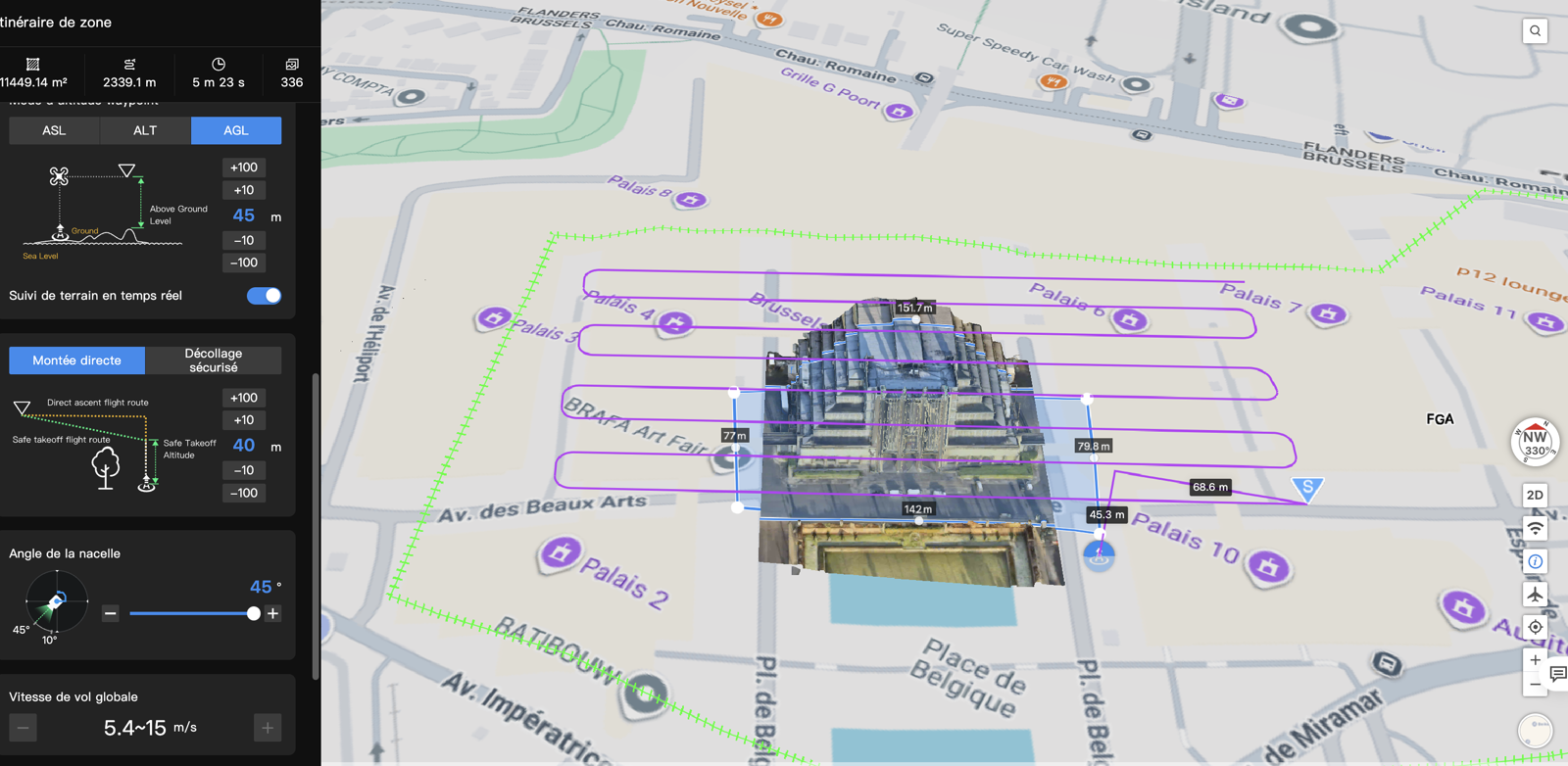
Le Vol 0, en Area Route oblique, sert à générer ce modèle de référence. Paramètres d’acquisition :
- Couverture : 12 170,09 m²
- 236 images, 4 min 53 s
- GSD : 1,62 cm/px (GSD oblique 2,28 cm/px)
- Altitude : 60 m AGL, avec suivi de terrain en temps réel
La reconstruction 3D dans FlightHub 2 donne :
- GSD d’aérotriangulation : 1,859 cm/px
- Système de coordonnées : WGS 84 / UTM zone 31N (EPSG:32631)
- Durée de reconstruction 3D : 28 min 14 s
- RMSE de reprojection : 1,092 px
- RMSE de géoréférencement : 0,018 m
Ce modèle 3D sert de référence et de base de planification pour tous les vols d’inspection suivants, en remplacement de Google Maps.
Les méthodes de vol comparées
Trois méthodes d’inspection ont ensuite été mises en œuvre sur ce modèle de référence, pour déterminer laquelle donne la meilleure précision selon la cible.
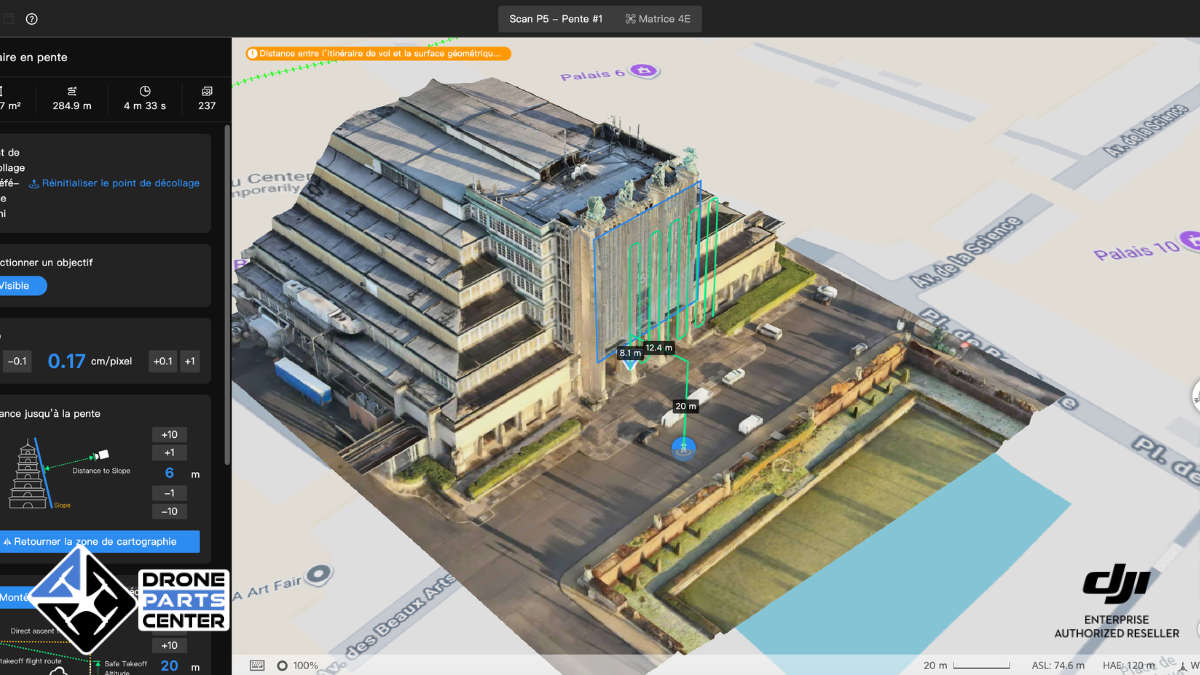
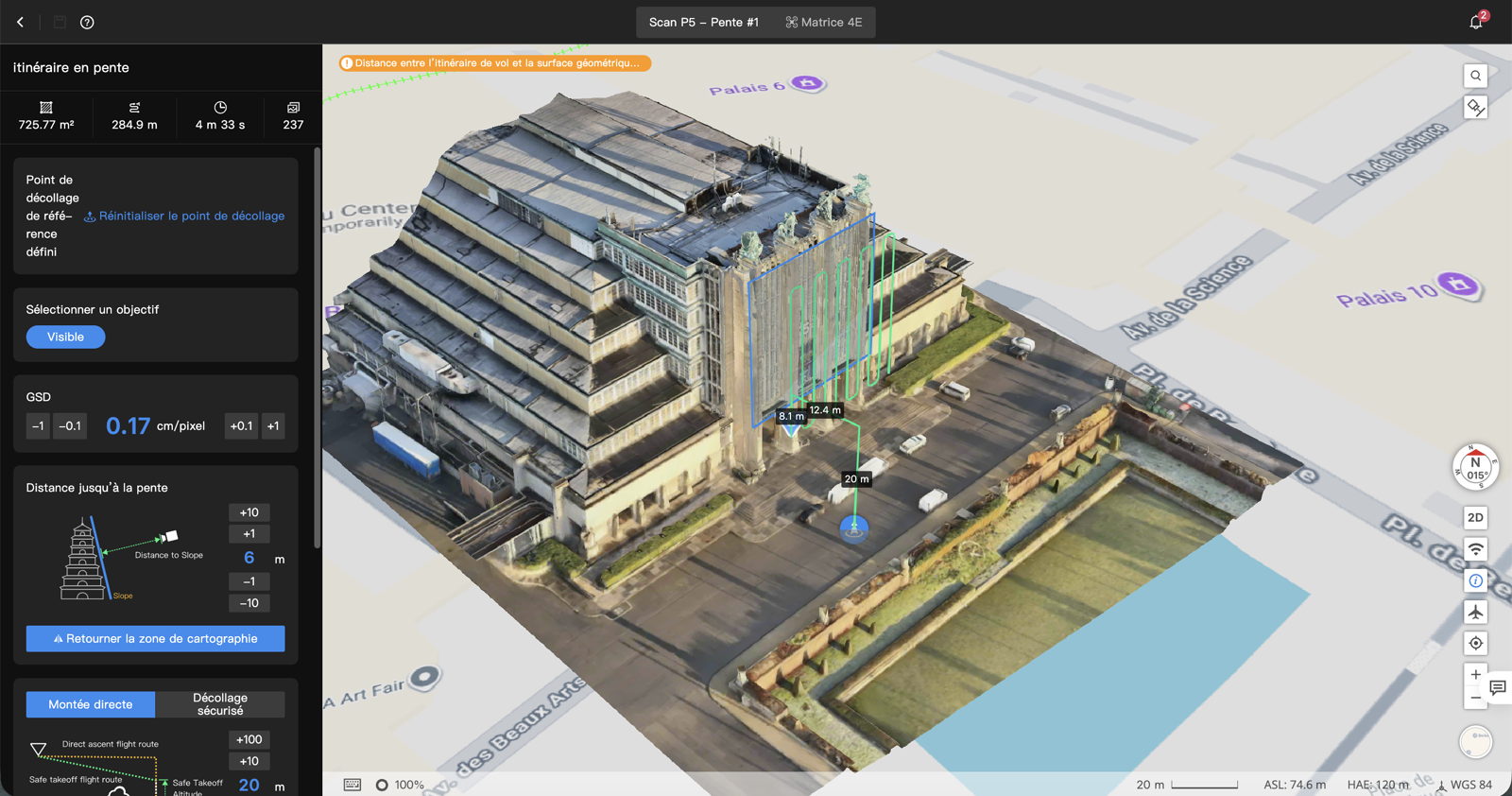
La Slope Route (Vol 1) couvre la façade complète. Objectif : évaluation de l’état général de la façade. Paramètres d’acquisition :
- Couverture : 725,77 m²
- 237 images, 4 min 33 s
- GSD : 0,17 cm/px
- Distance à la pente : 6 m
- Altitude : 81 à 107,2 m ASL, suivant la géométrie de la façade
Reconstruction dans FlightHub 2 :
- GSD d’aérotriangulation : 0,24 cm/px
- Durée : 1 h 16 min 47 s
- RMS de reprojection : 0,995 px
- RMSE de géoréférencement : 0,919 m
Le RTK Fix atteint 72 % sur ce vol (284 images sur 393) : la géométrie de scan verticale oriente le drone à l’opposé de la réception du signal sur certaines passes. Une seconde passe avec recouvrement, ou l’utilisation d’une station de base D-RTK 3, corrigerait ce point. Le résultat reste valide pour une évaluation qualitative de la façade.
La Geometry Route (Vol 2) cible les statues uniquement. Paramètres d’acquisition :
- Couverture : 639,64 m²
- 483 images, 7 min 53 s
- GSD : 0,20 cm/px
- Recouvrement : 80 % frontal, 70 % latéral
- RTK Fix : 100 % (483 images sur 483)
C’est la méthode la plus performante du test pour une géométrie complexe et contrainte.

La Smart3D Route a été conduite en complément pour comparer la précision de reconstruction à celle de la Geometry Route. Paramètres d’acquisition :
- Type : DJI Pilot 2 Smart 3D
- Couverture : 540,07 m²
- 1 065 images, 10 min 26 s
- GSD : 0,14 cm/px
- Recouvrement : 70 % frontal, 70 % latéral
- Distance à la pente : 5 m
La Smart3D offre une couverture plus large (107 796 m²) mais nécessite 3,7 fois plus d’images et 2,9 fois plus de temps de traitement que la Geometry Route pour la même zone d’intérêt.
Les résultats de précision
Le tableau ci-dessous compare les trois méthodes d’inspection sur les critères d’aérotriangulation et de géoréférencement, d’après les quality reports générés par DJI Terra.
| Paramètre | Geometry Route | Smart3D Route | Slope Route |
|---|---|---|---|
| Images | 483 | 1 065 | 393 |
| Images calibrées | 483 (100 %) | 1 065 (100 %) | 392 (99,7 %) |
| RTK Fix | 483/483 (100 %) | 1065/1065 (100 %) | 284/393 (72 %) |
| GSD | 1,151 cm/px | 1,334 cm/px | 0,17 cm/px |
| RMSE géoréf. | 0,012 m (meilleur) | 0,060 m | 0,919 m |
| RMS reprojection | 1,096 px | 1,110 px | 0,955 px |
| Points de liaison | 65 573 | 323 001 | 128 393 |
| Temps de traitement 3D | 33 min | 1 h 38 min | 1 h 17 min |
| Zone de couverture | 639,64 m² | 107 796 m² | 725,77 m² |
Le RTK Fix par mission confirme la hiérarchie : Geometry Route 100 % (écart-type H moyen 0,483 cm, V 0,706 cm), Smart3D 100 % (H 0,307 cm, V 0,478 cm), Slope Route 72 % (H 5,604 cm, V 6,978 cm). Le GSD de la Slope Route est mesuré relativement à la surface de la pente à 6 m de distance ; son RMSE de 0,919 m reflète la difficulté inhérente de l’aérotriangulation sur surface verticale sans GCP, et reste valide pour une inspection qualitative.
La conclusion technique est nette : la Geometry Route est la méthode optimale pour une géométrie complexe et contrainte, avec un RMSE de géoréférencement de 0,012 m, un RTK Fix de 100 %, et 3,7 fois moins d’images que la Smart3D pour un résultat équivalent sur la zone d’intérêt. La Smart3D garde son intérêt pour une couverture large, au prix d’un volume d’images et d’un temps de traitement nettement supérieurs.
Un point de vigilance : planifier sur un modèle 3D, jamais sur un fond carto générique
Une vérification a été conduite pour mesurer l’écart entre une planification sur modèle 3D réel et une planification sur fond cartographique standard. Une mission a été recréée dans DJI Pilot 2 en reproduisant la géométrie de la Geometry Route, mais sur un fond Google Maps. À la comparaison avec le modèle 3D géoréférencé de FlightHub 2, un décalage de position d’environ 2 mètres est apparu. À une distance de vol de 6 mètres des statues, ce décalage aurait provoqué une collision si la mission avait été exécutée automatiquement sans capteurs d’évitement d’obstacles. La mission a été annulée avant exécution.
L’enseignement est un point de méthode : une inspection automatisée à courte distance se planifie sur un modèle 3D géoréférencé réel, et non sur un fond cartographique générique. La marge d’erreur d’un tel fond, sans conséquence pour de la cartographie à grande échelle, devient critique à quelques mètres d’une structure.
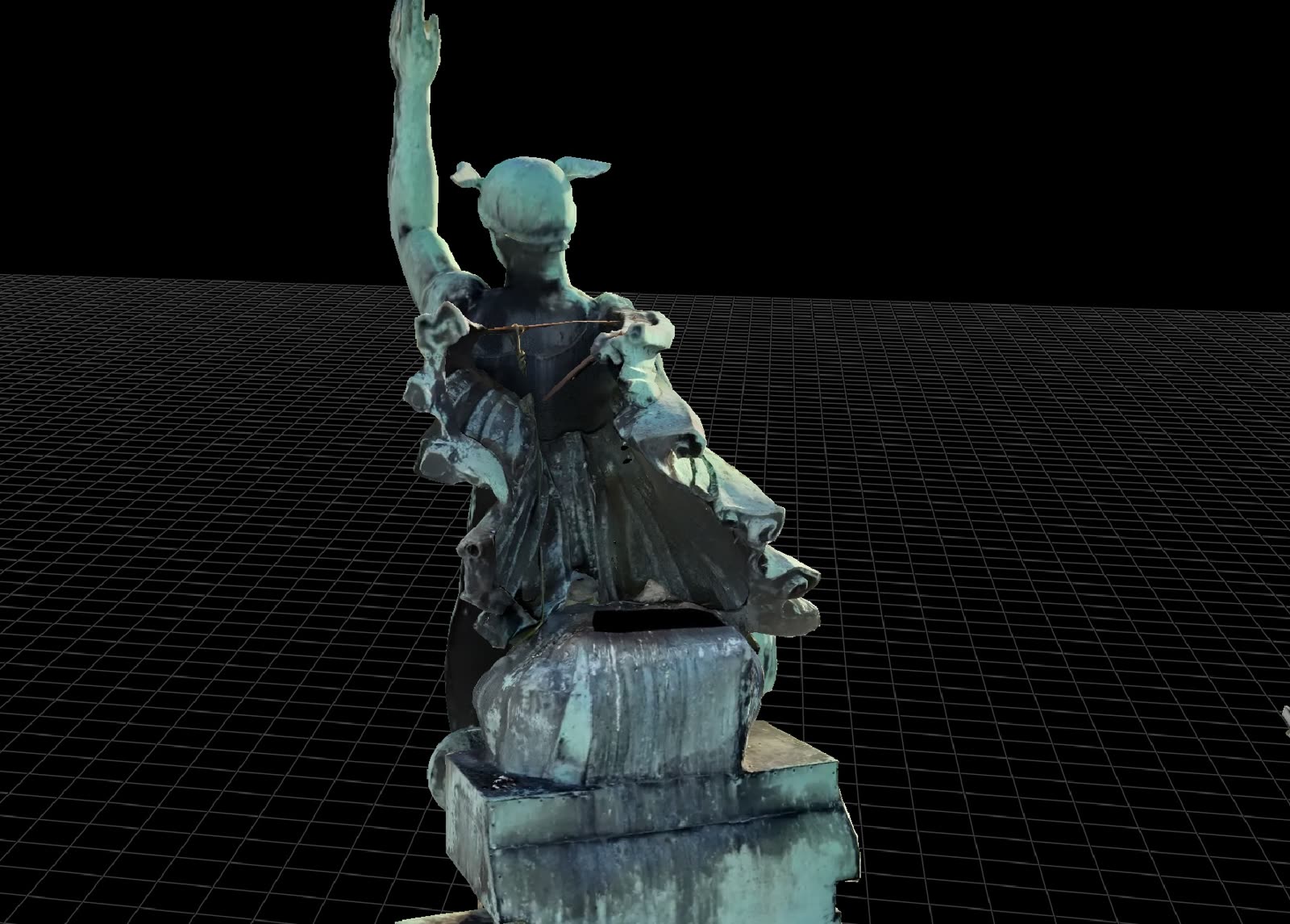
Le résultat exploitable : un défaut invisible depuis le sol
Le maillage 3D texturé des statues issu de la Geometry Route a été généré à une résolution de 1,15 cm/px dans DJI Terra, en calcul local autonome (standalone) sur station de travail (AMD Ryzen 7 5800X3D, RTX 4070 Super, 64 Go de RAM, densité de points élevée, qualité élevée, données POS RTK activées). Résolution suffisante pour identifier des défauts de surface de l’ordre du millimètre sur le bronze. Le modèle est directement visualisable et mesurable dans FlightHub 2 : distances, angles et états de surface évaluables à distance.
L’inspection du modèle 3D a révélé une anomalie : un support de fixation cassé sur l’une des statues, invisible depuis le sol et identifié uniquement grâce au modèle. Le défaut a été remonté au service technique de Brussels Expo avec une localisation 3D annotée précise. DJI Terra a produit un maillage 3D texturé, un nuage de points et une orthophoto 2D (TDOM à 1,01 cm/px). Aérotriangulation 2 min 29 s, reconstruction 3D 33 min, RMSE de géoréférencement 0,012 m.
L’intégration dans le flux de travail de Brussels Expo
Le service technique de Brussels Expo est responsable de la maintenance patrimoniale et de la surveillance structurelle des 12 halls, dont le Palais 5. Sa contrainte initiale, l’absence de documentation 3D et la dépendance à un accès physique pour chaque inspection, est levée par les livrables. Le modèle 3D texturé de la façade et des statues est chargé directement dans FlightHub 2, accessible à distance, sans logiciel tiers (format B3DM). Les dimensions, largeurs de fissures et hauteurs d’éléments inaccessibles sont mesurables sans intervention physique. Le nuage de points au format LAS est importable dans AutoCAD pour l’analyse structurelle. La reproduction de plans de vol identiques à intervalles réguliers, avec le même plan Geometry Route, produit des modèles comparables, ce qui permet un suivi automatisé de la dégradation. Les routes de mission sauvegardées dans FlightHub 2 sont reproductibles à l’identique pour les cycles de surveillance futurs.
Synthèse
Sur le plan technique, la Geometry Route est optimale pour une géométrie complexe et contrainte (RMSE 0,012 m, RTK Fix 100 %, 3,7 fois moins d’images que la Smart3D), le réseau RTK remplace les points de calage au sol (GCP) pour une précision absolue équivalente lors de la reconstruction et une mise en œuvre plus rapide, et le livrable est directement accessible dans FlightHub 2 par l’utilisateur final. L’écosystème DJI complet (Matrice 4E, FlightHub 2, DJI Terra) n’a nécessité aucun logiciel tiers. L’opération s’est déroulée en espace aérien contrôlé avec coordination ATC, conforme au règlement EU 2019/947.
Sur le plan applicatif, la méthode remplace le besoin d’équipement lourd et coûteux, réduit les coûts opérationnels de moitié à un tiers, supprime le risque pour la sécurité des travailleurs en hauteur, et produit une documentation 3D précise de structures patrimoniales de 90 ans sans référence de base préexistante. Les perspectives sont directes : extension de la numérisation aux 12 palais pour une référence patrimoniale complète, cycles annuels en Geometry Route avec comparaison automatisée des modèles pour détecter les changements structurels, et transposition à d’autres bâtiments classés en Belgique et au Benelux où l’accès aux façades est restreint.
Ce que cette mission démontre pour votre projet d’inspection
Le choix de la méthode de vol détermine la qualité du livrable. Pour une géométrie complexe et contrainte, la Geometry Route de FlightHub 2, couplée au réseau RTK et à un modèle 3D de référence généré en Area Route, atteint un RMSE de géoréférencement de 0,012 m et détecte des défauts millimétriques sur des éléments inaccessibles, sans points de calage au sol et sans accès physique.
Drone Parts Center, revendeur agréé DJI Enterprise pour le Benelux, accompagne les gestionnaires d’ouvrages, les bureaux d’études et les opérateurs sur ce type de mission d’inspection par drone : choix du matériel, méthodologie d’acquisition, traitement photogrammétrique et intégration des livrables dans votre flux de travail. Pour évaluer la faisabilité d’une inspection 3D sur votre site, contactez notre équipe technique à Nivelles.
Questions fréquentes
Quelle méthode de vol DJI est la plus précise pour des statues ou une géométrie complexe ?
La Geometry Route de DJI FlightHub 2. Sur cette mission elle a atteint un RMSE de géoréférencement de 0,012 m avec un RTK Fix de 100 %, tout en utilisant 3,7 fois moins d’images que la méthode Smart3D pour un résultat équivalent sur la zone d’intérêt.
Quelle différence entre Geometry Route et Smart3D Route ?
La Geometry Route cible une zone d’intérêt précise avec un nombre d’images réduit et un temps de traitement court (483 images, 33 min sur ce cas). La Smart3D Route couvre une zone bien plus large (107 796 m²) mais demande 3,7 fois plus d’images et 2,9 fois plus de temps de traitement. Pour une géométrie complexe et délimitée comme des statues, la Geometry Route est plus efficace ; pour une couverture étendue, la Smart3D garde son intérêt.
Faut-il déployer des points de calage au sol (GCP) ?
Pas avec un drone à récepteur RTK intégré comme le DJI Matrice 4E connecté à un réseau RTK. Le drone obtient un géoréférencement absolu de niveau sous-centimétrique en mode RTK Fix, sans cibles physiques sur le site, ce qui accélère la mobilisation pour une précision absolue équivalente.
Un drone peut-il détecter des défauts invisibles depuis le sol ?
Oui. Sur cette mission le maillage 3D texturé à 1,15 cm/px a permis d’identifier un support de fixation cassé sur une statue située à plus de 50 mètres de hauteur, défaut invisible depuis le sol et localisé précisément dans le modèle 3D, sans aucun accès physique.
Pourquoi planifier une inspection sur un modèle 3D plutôt que sur Google Maps ?
Un fond cartographique générique présente un écart de position pouvant atteindre environ 2 mètres par rapport à la géométrie réelle. Sans conséquence pour de la cartographie large, cet écart devient critique pour une inspection rapprochée à quelques mètres d’une structure, où il peut provoquer une collision en vol automatisé. Un modèle 3D géoréférencé généré dans FlightHub 2 supprime ce risque.